Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 05 junho 2024

Design and analysis of a tendon-driven snake-arm robot based on a spherical magnets
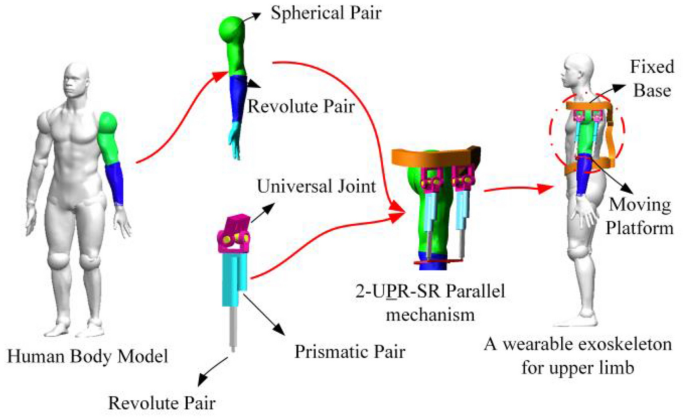
Design and Analysis of a Novel Shoulder Exoskeleton Based on a Parallel Mechanism, Chinese Journal of Mechanical Engineering

Design, Analysis and Implementation of a Robotic Arm- The Animator
Frontiers Optimizing the Rigid or Compliant Behavior of a Novel Parallel-Actuated Architecture for Exoskeleton Robot Applications
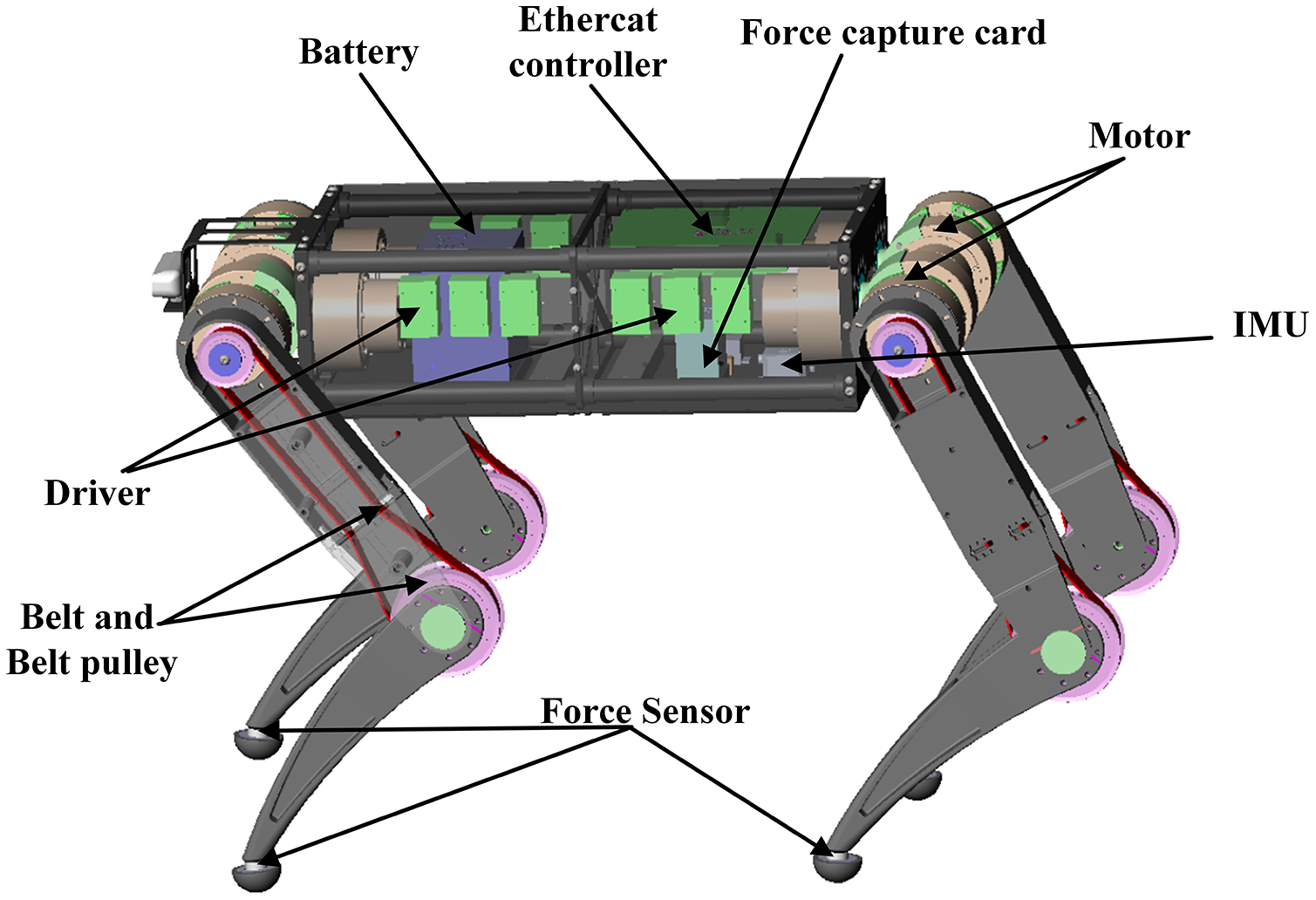
Whole-body kinematic and dynamic modeling for quadruped robot under different gaits and mechanism topologies [PeerJ]
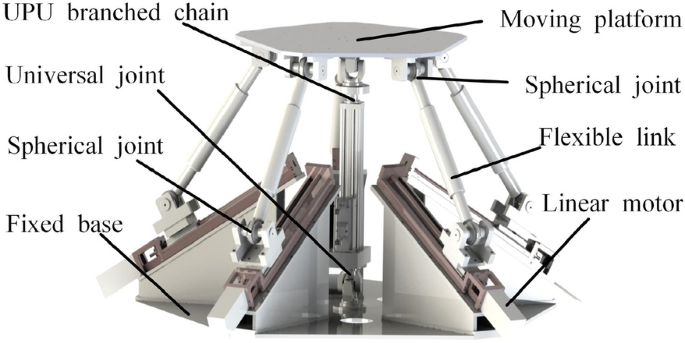
Dynamic Accuracy Analysis of a 5PSS/UPU Parallel Mechanism Based on Rigid-Flexible Coupled Modeling, Chinese Journal of Mechanical Engineering

Design of a robotic manipulator for handling products of automotive industry - Miroslav Blatnický, Ján Dižo, Juraj Gerlici, Milan Sága, Tomáš Lack, Erik Kuba, 2020

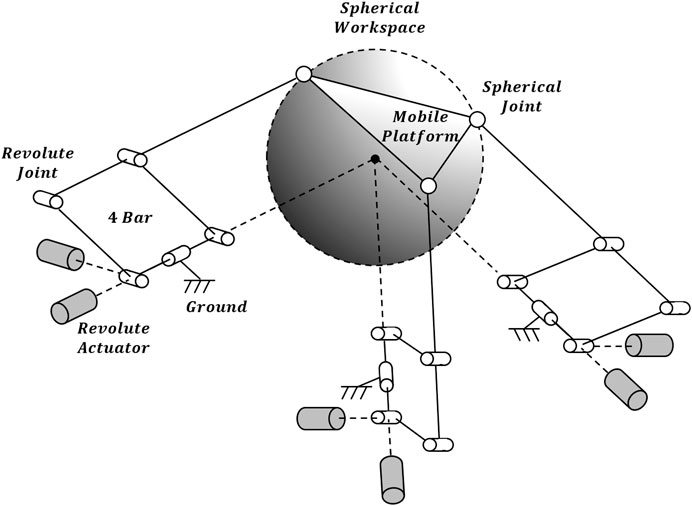
Workspace characterization and kinematic analysis of general spherical parallel manipulators revisited via graphical based approaches - ScienceDirect
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

A 3-RRR Spherical Parallel Manipulator Reconfigured with Four-bar Linkages
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

PDF) Parallel Robot - Review Article
Recomendado para você
-
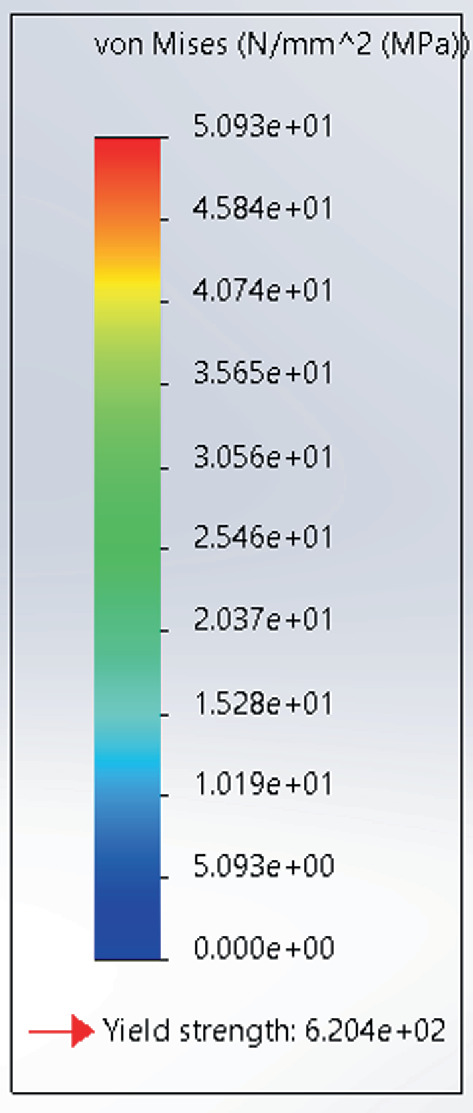
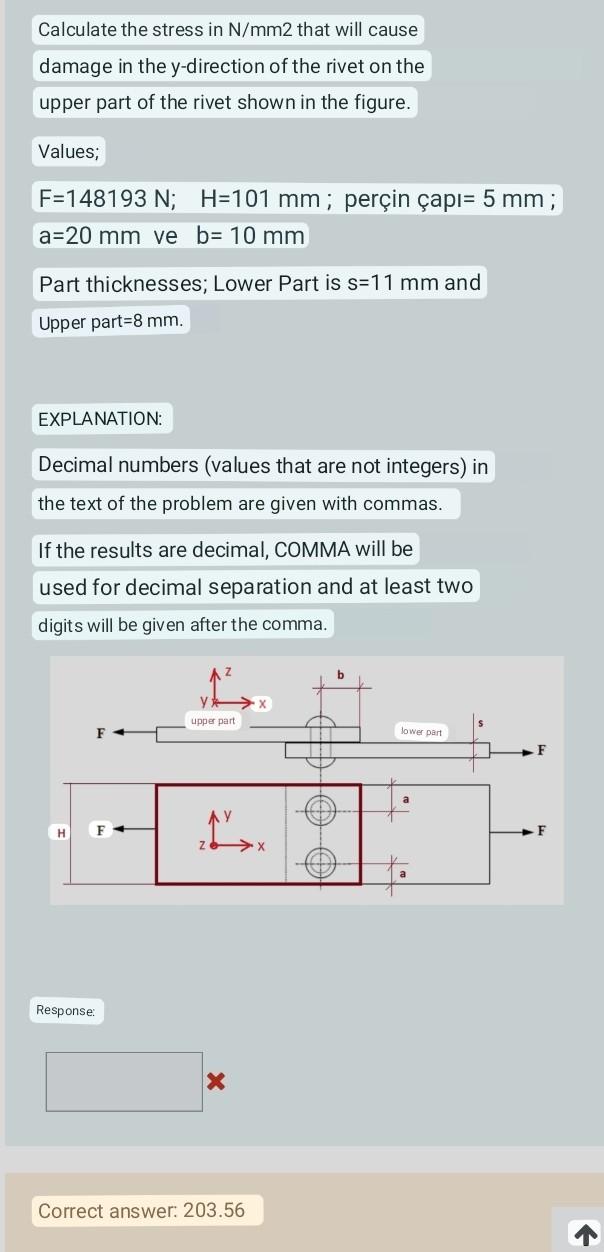
Solved Calculate the stress in N/mm2 that will cause damage05 junho 2024
-
 Buildings, Free Full-Text05 junho 2024
Buildings, Free Full-Text05 junho 2024 -
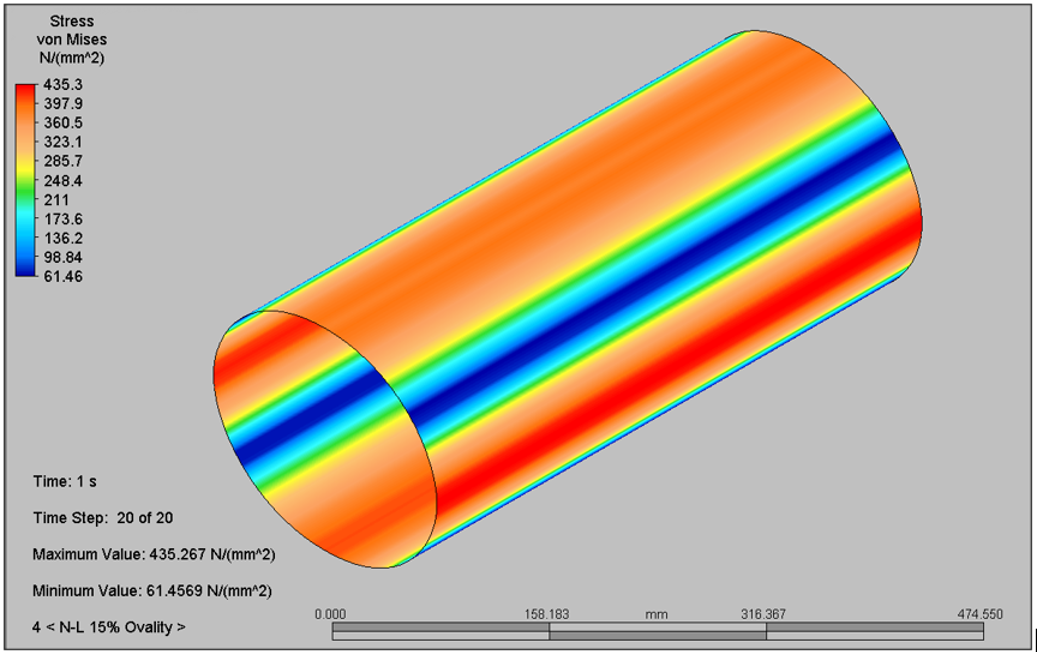
 Contact Stress module :: Gerolab05 junho 2024
Contact Stress module :: Gerolab05 junho 2024 -
 Fitness-for-Service - Acuren05 junho 2024
Fitness-for-Service - Acuren05 junho 2024 -
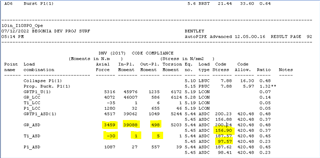 Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities05 junho 2024
Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities05 junho 2024 -
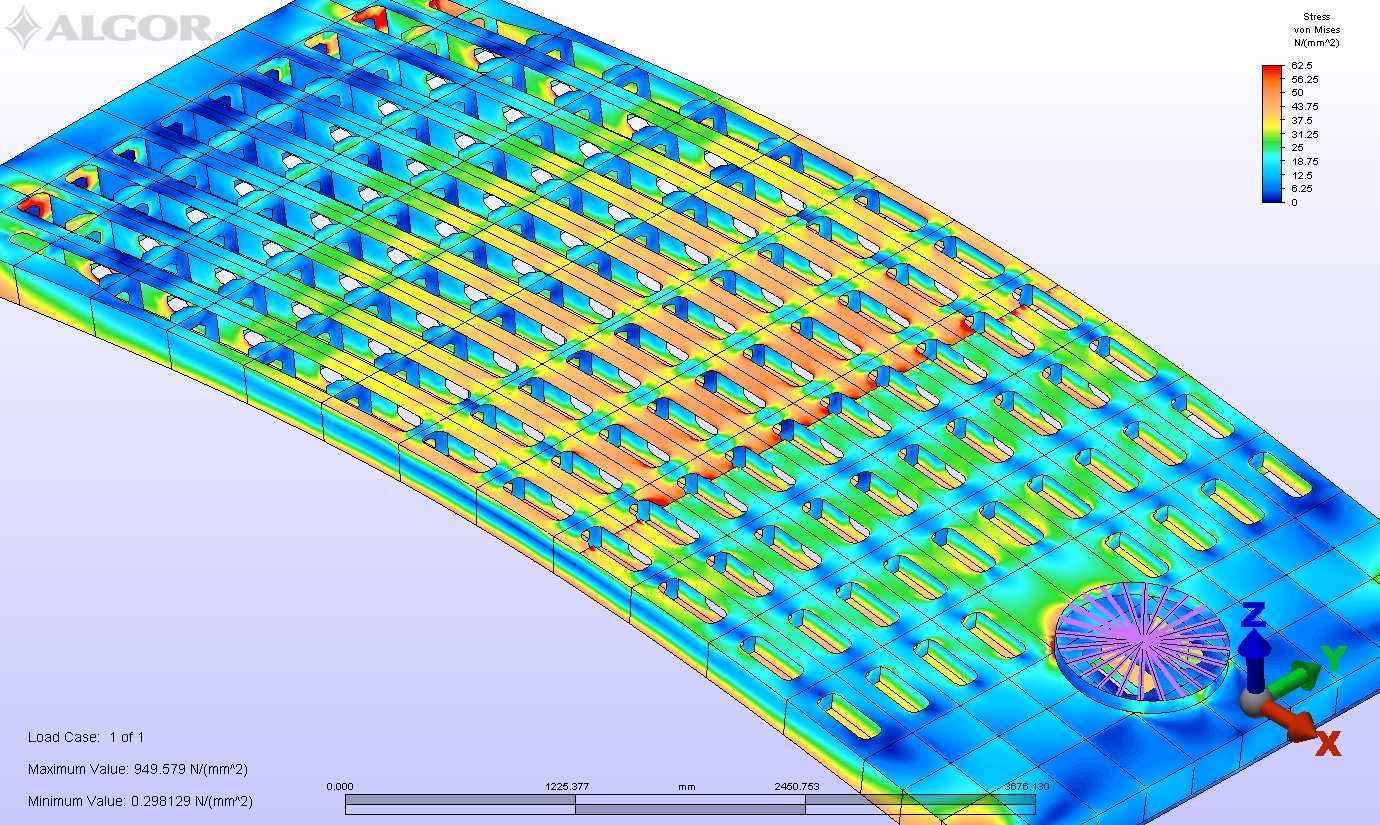 Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.05 junho 2024
Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.05 junho 2024 -
 Ultimate Tensile Strength – Best Indicator Of Material Strength - The Bombay Tools05 junho 2024
Ultimate Tensile Strength – Best Indicator Of Material Strength - The Bombay Tools05 junho 2024 -
 Ste db etg88-100_rgb_en05 junho 2024
Ste db etg88-100_rgb_en05 junho 2024 -
2020 SolidWorks - Assessing Stress Hot Spots05 junho 2024
-
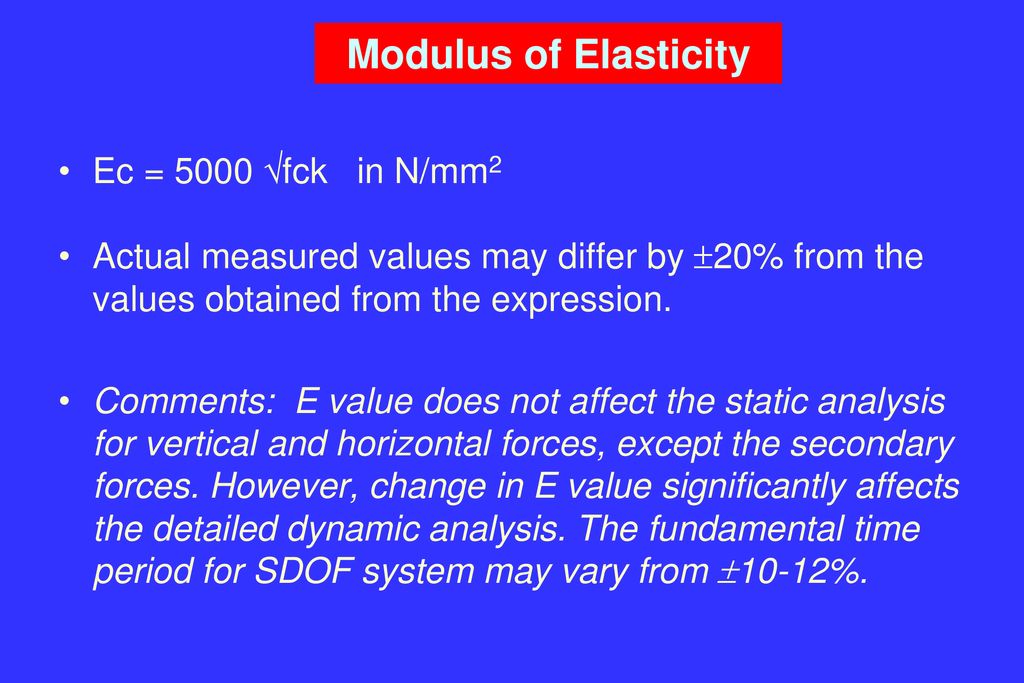 Assistant Professor) Department of Civil Engineering - ppt download05 junho 2024
Assistant Professor) Department of Civil Engineering - ppt download05 junho 2024
você pode gostar
-
![Minecraft Classic [Articles] - IGN](https://pcmedia.ign.com/pc/image/object/093/093451/Minecraft-Classic_WEB.jpg?width=300&crop=1%3A1%2Csmart&auto=webp) Minecraft Classic [Articles] - IGN05 junho 2024
Minecraft Classic [Articles] - IGN05 junho 2024 -
 MÁSCARA DE CÍLIOS THE COLOSSAL VOLUM' EXPRESS® SUPERFILME - Charmy Makes05 junho 2024
MÁSCARA DE CÍLIOS THE COLOSSAL VOLUM' EXPRESS® SUPERFILME - Charmy Makes05 junho 2024 -
 Brian Riemer at RSC Anderlecht 2022/23 - tactical analysis05 junho 2024
Brian Riemer at RSC Anderlecht 2022/23 - tactical analysis05 junho 2024 -
 Episódio 75 (Ômega), Saint Seiya Wiki05 junho 2024
Episódio 75 (Ômega), Saint Seiya Wiki05 junho 2024 -
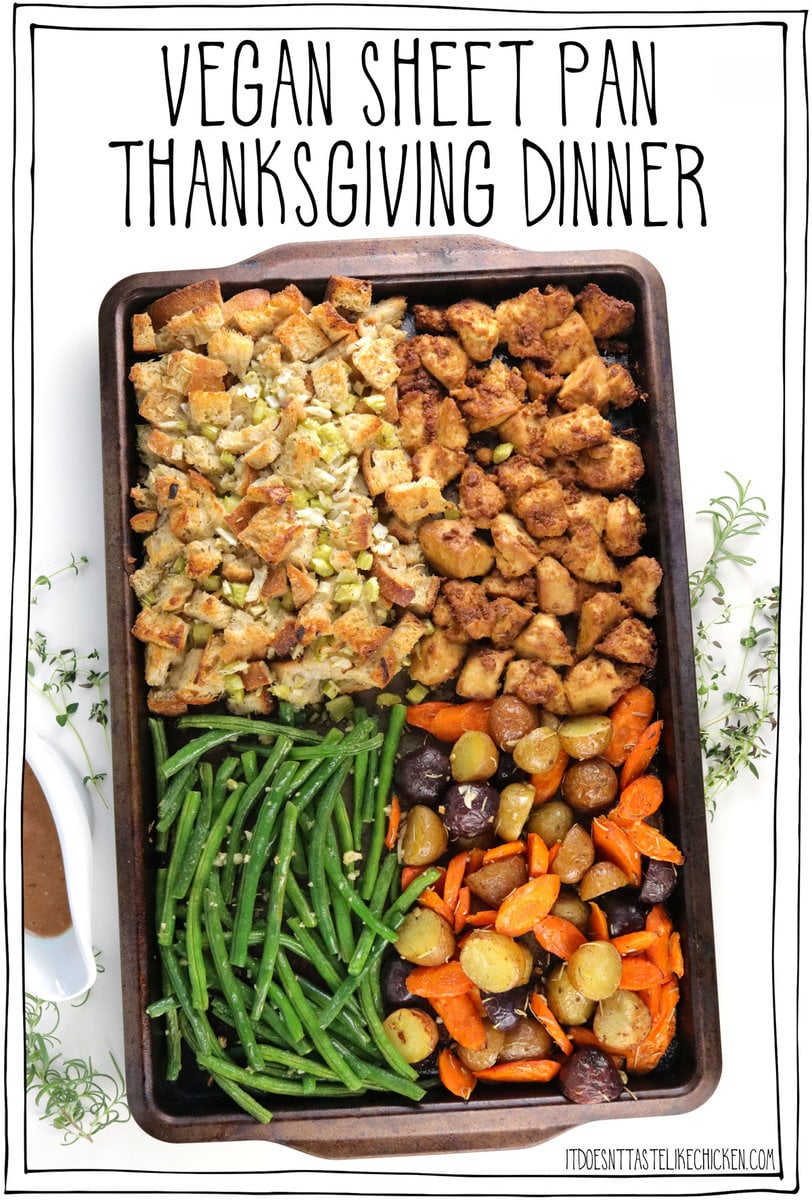 Vegan Sheet Pan Thanksgiving Dinner • It Doesn't Taste Like Chicken05 junho 2024
Vegan Sheet Pan Thanksgiving Dinner • It Doesn't Taste Like Chicken05 junho 2024 -
 Western Riding - Everything you need to know05 junho 2024
Western Riding - Everything you need to know05 junho 2024 -
 Akame ga Kill! TV Review05 junho 2024
Akame ga Kill! TV Review05 junho 2024 -
 Flamengo figura em ranking de times com mais prêmios 'Craque do05 junho 2024
Flamengo figura em ranking de times com mais prêmios 'Craque do05 junho 2024 -
 Brasil sofre 2º revés na Liga das Nações Feminina com derrota para EUA05 junho 2024
Brasil sofre 2º revés na Liga das Nações Feminina com derrota para EUA05 junho 2024 -
 The Eminence in Shadow – 13 – The Beast Girl, the Witch and the Wardrobe – RABUJOI – An Anime Blog05 junho 2024
The Eminence in Shadow – 13 – The Beast Girl, the Witch and the Wardrobe – RABUJOI – An Anime Blog05 junho 2024